
上海海洋大学远洋渔业资源调查船“淞航”号于2018年11月8日18点45分由芦潮港出发,途径中国东海、钓鱼岛附近,穿越日本与那岛屿海峡、菲律宾巴士海峡、中国南海西沙群岛北部,于2017年11月29-30日停靠海南三亚凤凰岛客运码头。12月1日在锚地抛锚,12月2日由南海向上海航行,12月12日抵达上海芦潮港码头,累计航次天数22天,航行距离约2500海里(见图1),顺利完成了调查船的首次航行。此次参与“淞航”号航次的科考人员、船员、实验员、701所、船厂、供应商人数共计102名。

图 1淞航号首航航迹示意图
此次“淞航号”首航完成拖网网具系统、金枪鱼延绳钓、鱿鱼钓系统三种捕捞作业方式功能性测试工作、7项渔捞科考辅助设备功能性验收工作,以及21项科考仪器设备功能性验收测试工作。
1.验收工作
1.1拖网系统:
淞航号拖网系统一共配备3种网具,分别是浅层拖网、深水拖网和中层拖网。
2017年11月12日下午01:00时,淞航号抵达北纬27˚21′,东经124˚10′,水深约100米的海域开始放浅层拖网,下午04:30结束。
2017年11月28日下午01:00时,淞航号抵达北纬17˚15′,东经110˚10′,水深约600米的海域开始放深水拖网(见图2),实验共经历近4个小时时间,共获得深海鱼类、甲壳类、软体动物和棘皮动物等27尾,共15种。下午04:30结束。
2017年12月3日下午01:00时,淞航号抵达北纬17˚12′,东经110˚03′,水深约600米的海域开始放中层拖网,下午02:15结束。
2017年12月10日上午08:20时,淞航号抵达北纬29˚56′,东经123˚28′,水深约60-70米的海域开始放中层拖网,上午10:30结束。

图2 拖网实验
结论:
本航次对3种网具分别进行了测试,并就船、曳纲绞机、起网辅助绞机等甲板机械、20吨A架、网具控制系统进行了系统的操作配合,拖网系统和网具性能测试达到了预期的目的。
1)渔具各项主尺度、装配、连接基本符合技术要求,网具投放、拖曳过程中状态良好。
2)网板各项性能优异,达到设计要求。
3)深水拖网浮球耐压800m,未能达到设计要求。
4)拖网测试结果显示,网口水平扩张均符合设计要求,网口垂直扩张稍偏低,需进一步多次测试调整。
1.2金枪鱼延绳钓海试:
金枪鱼延绳钓是利用投放的主绳、浮球和浮绳、支绳、钓钩和鱼饵等组装的钓具系统,用来钓捕中上层鱼类的渔具。2017年11月27日上午10:30,淞航号抵达北纬18˚15′,东经111˚28′,水深约1000米的海域开始投放延绳钓钓钩,11:30结束放钩,一共投放60枚钓钩。下午02:30开始起钩,04:00起钩结束(见图4)。共钓捕4尾帆蜥鱼(见图3)。
结论:延绳钓扬绳机,下绳机正常工作。

图3 金枪鱼延绳钓实验
1.3鱿鱼钓海试:
鱿鱼钓是利用灯光吸引浮游生物和鱿鱼到船边,利用自动化的拟饵钓钩在水中上下移动来钓捕海洋表层鱿鱼。2017年11月17日,淞航号抵达北纬21°52′,东经118°25′,水深约1000米的海域,下午02:00准备鱿鱼钓机和灯,晚上06:00开始启动鱿鱼钓机(见图4),晚上07:30结束钓机试验,无鱿鱼渔获量。
结论:鱿鱼钓机和灯能正常工作。水下灯装置需进一步完善。
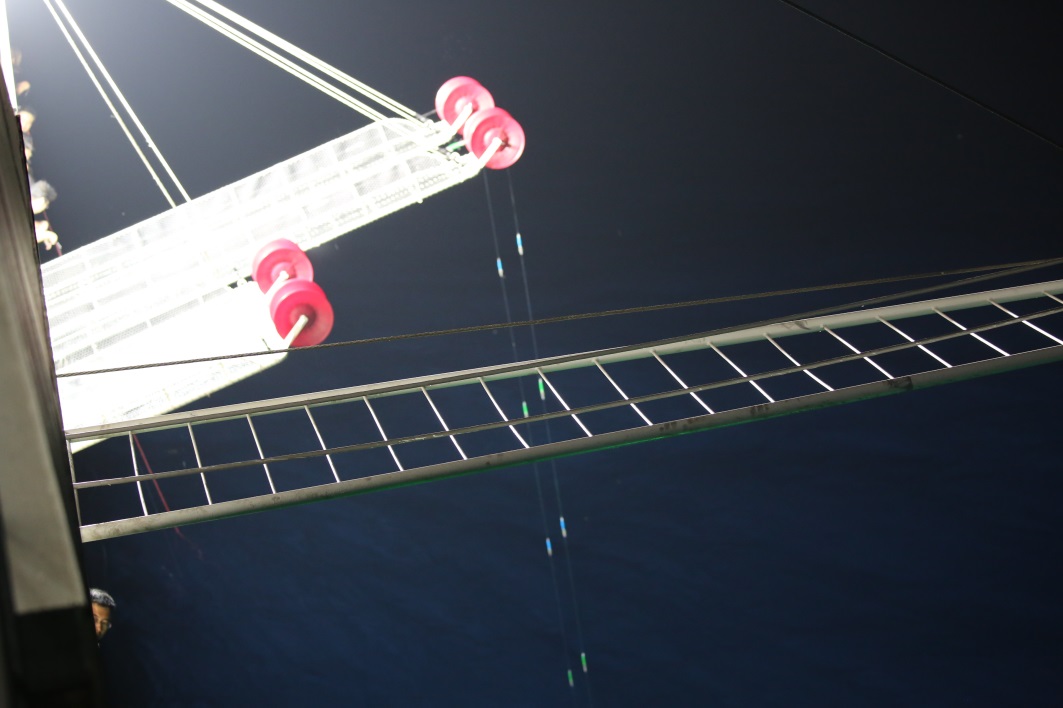
图4 鱿鱼钓实验
渔捞系统的三大声学助渔设备有:EK80科研鱼探仪、SU93全方位探鱼声呐、Scanmar拖网监控系统。前两者设备主要功能是“搜索鱼群”,通俗讲就是找鱼,尤其是EK80科研鱼探仪更具渔业资源评估的作用;Scanmar拖网监控系统主要是用来辅助拖网进行捕捞作业。这三套系统的共同使用将是渔业资源调查的重要利器。
1.4EK80鱼探仪
EK80主要用于探测海洋生物种类、种群数量、空间分布和迁徙动态,然后对回波信号进行处理,从而得出鱼类的分布范围和层位、族群大小、生物总量等分析数据,其具有快捷、取样率大而不以破坏生物资源为代价等优点。首航期间,主要进行了设备声学校正、噪音试验、参数性能的检验等。
声学校正:根据《淞航号EK80系统验收海试计划》,2017年11月9日、10日、14日分别对38kHz、70kHz、120kHz、200kHz换能器进行了校正,使用标准球包括22.2mm直径钨钢球及38.1mm直径的钨钢球。按照校正要求分别进行校正。具体操作是将标准球连接在细玻璃丝上,由工作人员操作将标准球下放置升降鳍下方,保证标准球处于换能器正下方,当标准球稳定信号出现在EK80显示器页面,即可进行数据记录和校正。
噪音测试:2017年11月12日,进行了EK80系统的船舶噪音测试。对不同船速下的船体噪声进行记录,用于评估不同调查速度下船体噪声对调查结果的影响。具体操作是关闭船上除EK80之外所有声学设备,将EK80六个频率调为被动模式。控制船速从0到最高速,设置相应的梯度,记录每一个船速下六个频率的噪声值,并记录环境条件。
1.5SU93全方位探鱼声呐
SU93全方位探鱼声呐系统是通过声波发送和接收以获得海洋生物信息,可实现对渔船周围各方向的探测,提供探测鱼群的方位、距离、深度、游速等多种信息。它能提供实时全景显示,多个鱼群动态信息,便于对多个目标判别、选取和跟踪。SU93全方位探鱼声呐系统对捕捞作业有着非常重要的作用。首航期间,主要进行了设备的系泊测试、设备噪音试验、参数性能的检验等。
系泊测试:2017年11月7日-8日,船只停泊期间对SU93全方位探鱼声纳系统进行设备安装检查,确认系统各子系统安装正确,工作正常,设备连接正常,接口数据正确等测试,确认可进行海试。
设备噪音试验:2017年11月12日,进行了SU93系统的船舶噪音测试。对不同船速下的船体噪声进行记录,用于评估不同调查速度下船体噪声对调查结果的影响。具体操作操作过程如下:关闭船上除SU93之外所有声学设备,设置SU93 TRX POWER为OFF,使其处于被动模式。设置相应的速度和方位梯度,记录每一个船速下不同方位的噪声值,并记录环境条件。
1.6 Scanmar拖网监控系统
Scanmar拖网监控系统是由舰桥系统、水听器和若干传感器组成的,是一套无线监测系统,能以图像的方式显示网位在水中的姿态。
首航期间本次主要测试了两套捕捞传感器、拖网眼传感器、贴底传感器、流速传感器、网板传感器以及网袖传感器。在放网完成后,随即就收到了传感器数据,根据收到的数据成功地实现了对拖网的调整,并实时监控拖网在水中的运行姿态。测试过程顺利,传感器信号接收稳定,回波清晰,可以依据传感器数据实现对拖网的调整,使得拖网在水下运行良好,并且时刻掌控拖网的运行状态。
存在问题:本航次的测试,基本完成了预定的测试任务,取得一定的成绩,但也暴露出很多的问题,这里面既有设备硬件也有沟通机制、人员配合等问题。
设备硬件
l18KHZ、333KHZ未成功校准(成功校准4个)。
l需更换18KHZ的收发器,需更换1个收发器备件。
l18kHz和200kHz 收发器的许可码是临时的,需要换成永久的。
l更换更高分辨率 EK80、SU93的KBM延长器。
l18kHz在4000米水深只检测到3600米,并未达到对底探测7000米的性能(未放升降鳍)。
l声纳围井中声纳缆线处需加隔板以防止升降过程中损坏换能器缆线。
lScanmar拖网监控系统中上纲到水面的距离无法显示。
l网板传感器铁盒固定底座生锈严重建议更换并作防锈处理。
人员配合
需要船员和实验员之间高度协调配合。
1.7 EM302 多波束
又称为多波束测深仪、条带测深仪或多波束测深声呐等,主要用于全覆盖高精度水深的测量,获得高清晰度的海底地形、地貌信息的装置。
2017年11月9日-12日,船只停泊期间对EM302多波束进行设备安装检查,确认系统各子系统安装正确、工作正常、设备连接正常、接口数据正确等测试,确认可进行海试。
2017年11月15日,中心坐标E118°16.18465′N21°49.5375′海域(该区域具备平坦和起伏水下地形),水深1200 m至2000 m,3级海况,开展设备检校试验。试验共布置了6条测线,每条≥7000m。通过实验,对系统的定位延时、横向偏角、纵向偏角、航向偏角等参数经行了校准。
2017年11月16日,中心坐标E118°18.7569′N21°43.1002′海域,水深范围1200 m至2000 m,3级海况,进行了多波束系统测深精度测试。共布置5条测线,2条主测线呈东北方向,3条检查线与主测线垂直,测线间距为3.5 km,测线长12-15km。分析实验数据,其内符合精度与外符合精度都满足GB1***7-1998《海道测量规范》规范要求(见图5)。
不足之处:在进行多波束调查时,由于天气、驾驶等原因,无法完全按测线行船,影响相邻测线的重合度。
2017年11月22日表面声速仪无法获取表面声速,电源、端口通讯正常。供应商疑似探头受阻或受损,建议后期整改安装到升降鳍尾部,方便日后检修。
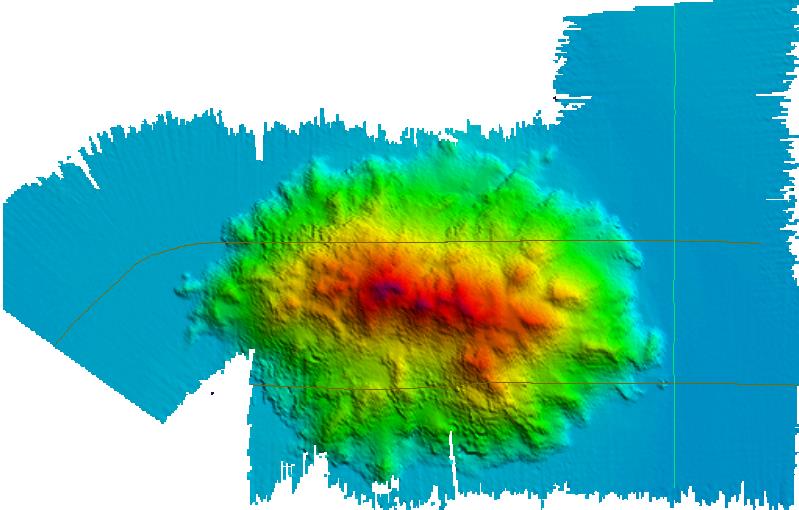
图5 试验区域水下三维地形图
1.8 TOPAS18浅剖
称浅地层地震剖面仪、浅层剖面仪。是一种走航式探测水下浅部地层结构和构造的地球物理方法。其主要特点是探测记录海底浅地层组织结构,以垂直纵向剖面图形反映浅地层组织结构,而且具有良好的分辨率,能够高效率探测海域的海底浅地层组织结构,主要用于揭示海底面以下的沉积地层,以此来划分地层层序,研究调查区的浅部地层结构、时空格架、发育历史及海侵海退、古气候变化等信息的测量设备。
海试期间,截至2017年11月22日,1块前置放大板、5块发射板陆续损坏,未能完成海试,其故障原因有待查明。
本次TOPAS 18验收测试未能完成,供应商与生产商须尽快查明故障原因并修复设备,搭载后期航次重新海试验收,产品质保期顺延。
1.9EA600单波束
单波束测深仪等声呐仪器是当前最为有效的水声探测设备。单波束万米测深仪系统主要用于海水深度的测量,并为其他海洋调查提供水深信息。
2017年11月8日“淞航”轮首航出发,依据计划,对EA600单波束测深系统进行了海试验收。试验由我校组织、供应商地海公司及厂商康斯伯格技术人员共同参与,试验海域水深范围20 m至6000 m,海况2级至3级。过程包括设备清单检查、系泊试验、海上测试(接口测试、设备性能测试)。在水深20米至6000米水域走航测试,通过比对单波束测深数据与多波束测深数据,测试其的探测性能。
本次EA600验收测试,验证了本设备的各项功能和性能,主要功能和性能满足设备技术规格书的要求。
1.10走航式声学多普勒海流剖面仪(OS-38K)1台
船载声学多普勒海流剖面仪是利用声学多普勒原理,能够在船舶走航条件下测量不同深度层海流流速、流向数据,是进行物理海洋研究与调查的必备科考设备。OS-38K最大测量深度可达1700m。
该套系统在新港船厂按照设备技术安装完毕,换能器采用水箱安装方式,换能器3波束方向自船首右偏45°。系统安装完成,经测试,整个系统通讯正常,GPS、姿态等外接传感器数据正常,符合海试条件。
2017年11月08日到30日,按航行试验大纲要求,上海海洋大学赵旭、陆雪俊、孟令文,劳雷海洋系统有限公司赵胜、郭衍龙等人对OS 38kHz声学多普勒流速剖面仪系统进行了下列各项测试:
目前“淞航号”配备最先进的浅海150kHz 和深海38 kHz两种不同频率的声学多普勒流速剖面仪。
2017年11月12日,海况3级,对OS38k换能器安装偏差角度进行了测试,完成了安装偏差校准试验。期间“淞航”号保持6-8节船速直线航行,水深大于110米。
2017年11月16日船体直线航行中完成,海况4级,航速约8节,完成了底跟踪最大测量水深及海流剖面最大量程测试。
2017年11月28日,在开阔海域布置4条11千米长的测线,测试期间船速保持6-8节左右,完成测流剖面合理性测试。
根据出航前的硬件测试及海上试验情况,OS38kHz声学多普勒流速剖面仪系统工作正常(见图6),系统硬件和性能符合合同及技术规格书中各项要求,达到系统正常工作标准。
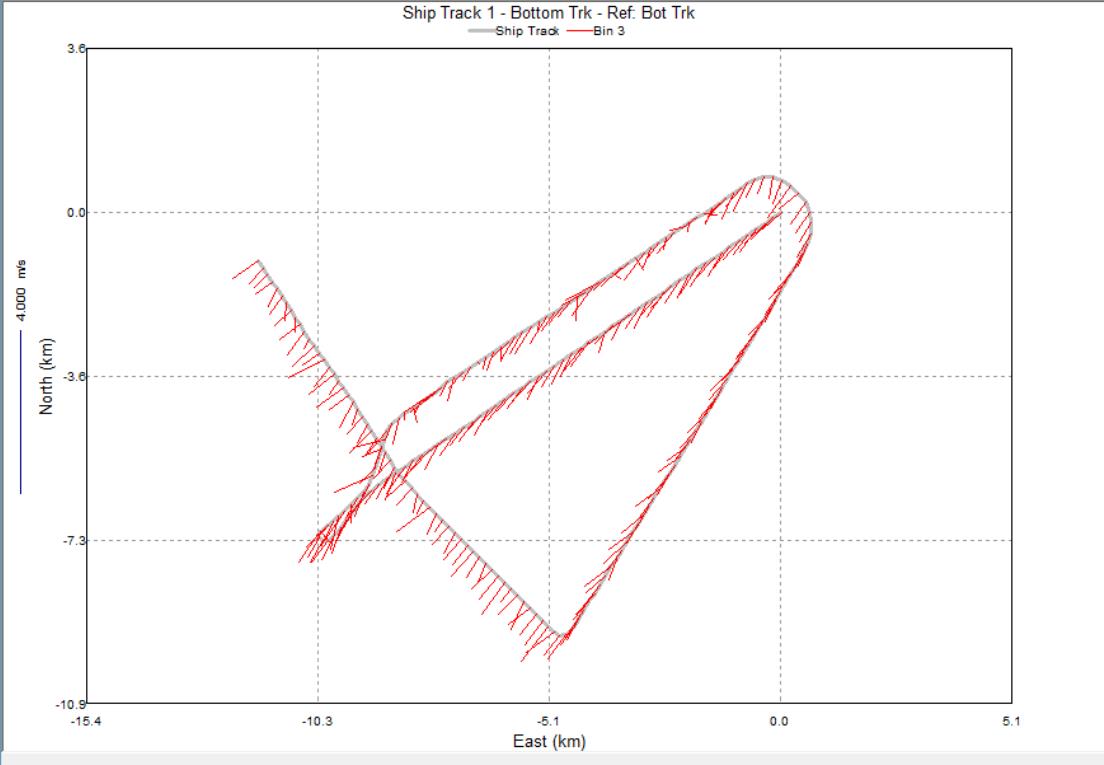
图6走航式声学多普勒海流剖面仪38K测试图
1.11走航式声学多普勒海流剖面仪(OS-150K)1台
与OS38K同样,该系统也已在天津新港船厂初装完毕,各个外接设备及通讯正常。符合海试条件,所不同的是OS-150K是适用于中层水深的,其最大测量深度为600m。
2017年11月08日到30日,按航行试验大纲要求,对整套系统进行了下列各项测试,参与人员上海海洋大学赵旭、陆雪俊、孟令文;劳雷海洋系统有限公司赵胜、郭衍龙。
2017年11月12日,海况3级,对OS150k换能器安装偏差角度进行了测试,完成了安装偏差校准试验。期间“淞航”号保持6-8节船速直线航行,水深大于110米。
2017年11月28日,在开阔海域布置4条11千米长的测线,测试期间船速保持6-8节左右,完成测流剖面合理性测试。
根据出航前的硬件测试及海上试验情况,OS150kHz声学多普勒流速剖面仪系统工作正常(见图7),系统硬件和性能符合合同及技术规格书中各项要求,达到系统正常工作标准。
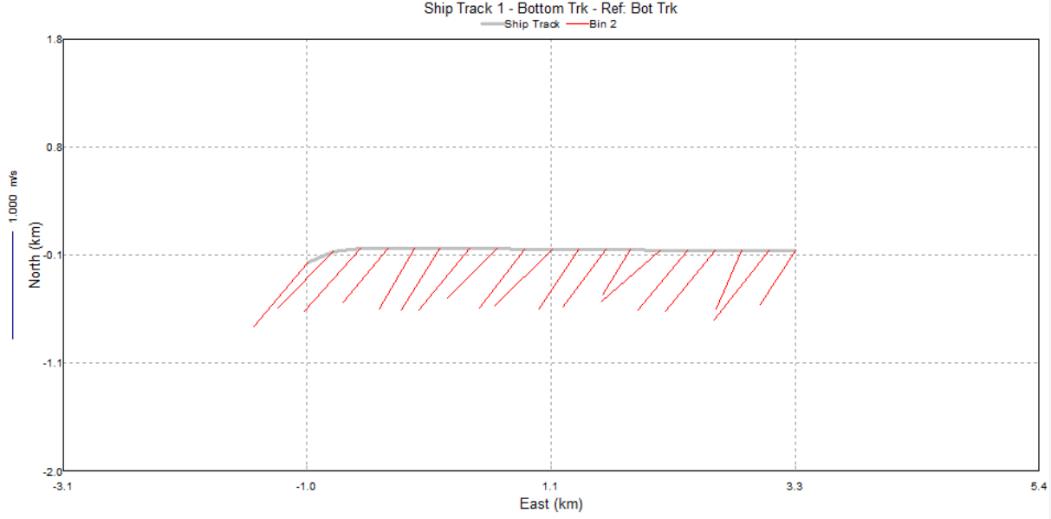
图7走航式声学多普勒海流剖面仪150 K测试图
1.12LADCP多普勒流速仪
WHS300- LADCP自容投放式声学多普勒流速剖面仪是一种利用声学多普勒原理、能够在船舶走航条件下测量不同深度层海流流速、流向的系统,轻巧方便。
2017年11月15日,在“淞航”号水文生化实验室内,对两套声学多普勒海流剖面仪进行了测试。将声学多普勒海流剖面仪各部分按测试要求组装起来使用实验室交流电源给设备供电,设备工作正常。
2017年11月22日,在116°20′05″E,17°7′19″N附近海域,进行投放测试,测试海域水深约3975米;海况5级。将两台声学多普勒海流剖面仪捆绑一起下放,其中SN:24481声呐头朝下,SN:24482声呐头朝上。
根据测试情况,LADCP声学多普勒海流剖面仪均能正常工作,数据采集及导出正常,系统硬件和性能符合合同及技术规格书中各项要求,达到系统正常工作标准。
海试结果,经开箱点验,两套设备实际到货与合同标称一致;通过安装调试及不同深度海域系统多次布放试验,上海海洋大学工作人员已熟练掌握整套系统的基本原理,系统接线,操作使用,维护保养,数据处理等内容;根据实验室及海上实际测试情况,此次采购的两套声学多普勒海流剖面仪均能正常工作,数据采集及导出正常(见图8),系统硬件和性能符合合同及技术规格书中各项要求,达到系统正常工作标准。
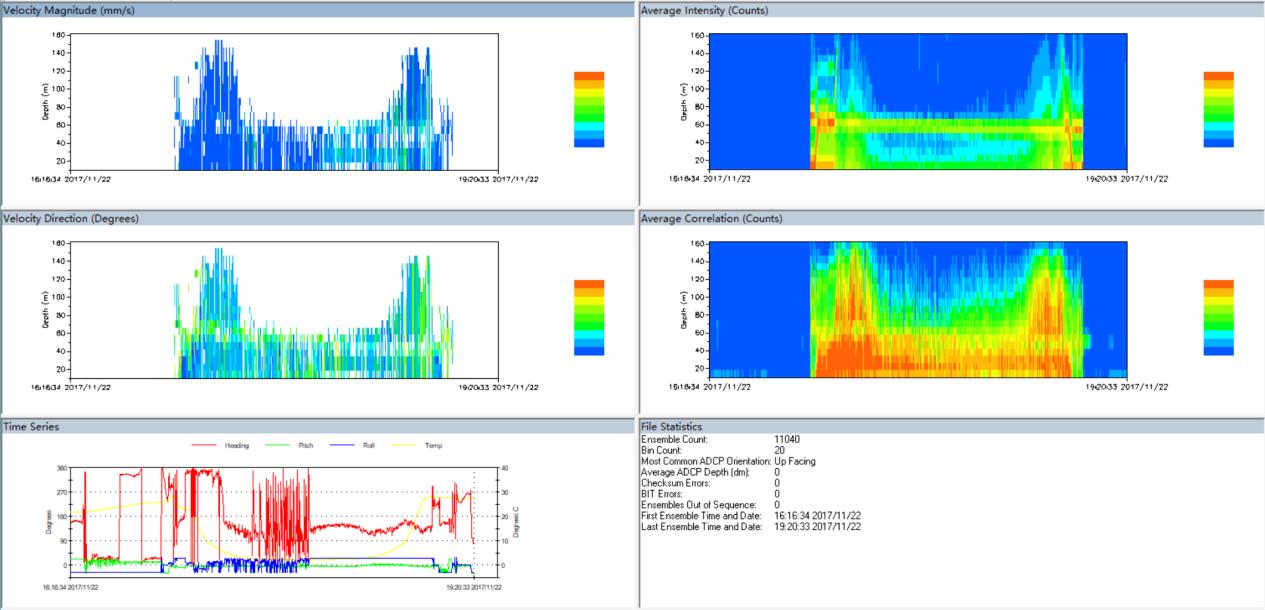
图8 LADCP多普勒流速仪300 K测试图
1.13 浮游生物连续采集网
浮游生物分层拖网主要是对海洋浮游生物进行采样,可以实现同一深度水平采集以及定点区域的垂直采集,同时记录水深、温度、盐度、叶绿素a浓度、溶解氧含量等参数。
2017年11月14日,水文绞车通讯组件安装完成后,对浮游生物连续采集网的在线通讯方式进行安装检查(见图9),确认系统各子系统安装正确,工作正常,设备连接正常,接口数据正确等测试,确认可进行海试。

图9浮游生物连续采集网安装
在线垂直拖网操作过程:
2017年11月22日,中心坐标E116°33’50’,N17°19’19’’海域,水深3900米,4级海况条件下进行下放验收实验。
拖网准备:厂家配备的V型缆长度太长,而在线布放时使用的CTD绞车吊臂的最大高度为2.3米,无法布放。为适应CTD绞车的高度,将一根V型缆改装,拆成2根,长度缩减为原来的约2/5,经实测,能够适配CTD绞车。
组件组装:安装5个网衣和5个网底管,将网衣调整平行后固定住网底管,安装4根承重的网底管拉绳以及2根粗的红色操作绳,并打结至网底管拉绳长度,兼作保护绳,用撬棍撬起5根弹簧,并注意拉平帆布,连接绞车缆,开机测试通讯正常,用CTD绞车吊起准备投放(见图10)。
系统投放:以25米/分钟的速度放缆,至设备测到的压力值为2500 dbar,此时的缆绳长度为3985 m。
采样:到达2500 dbar后,按软件或甲板单元上的ACTION按钮,显示NET值为1。开始以60米/分钟的速度收缆。操作人员实时监控电脑和甲板单元上的数据,当压力数据达到1500 dbar,1000 dbar,500 dbar,200 dbar时,按“action”,实现换网。监测到流量计的顺势流速能达到3米/秒,为避免流速过大破坏网衣,将收缆速度减少到45米/秒。收缆至设备到达水面。
样品收集:按要求应该使用海水水管冲洗已出水面的网衣,将尽量多的样品冲洗到网底管中。由于船的条件所致,未对网衣进行冲洗。将网衣先拉回底部的网底管框架,一人抱住网避免压到,再通过吊臂将主框架收回至甲板。检查5个弹簧都已经激发,5个网衣无损伤,各个连接件均正常。将网底管取下,通过上面的筛绢倒掉无用的海水。使用本地的海水冲刷网底管内部,将尽量多的样品冲刷下来,倒在样品瓶中。
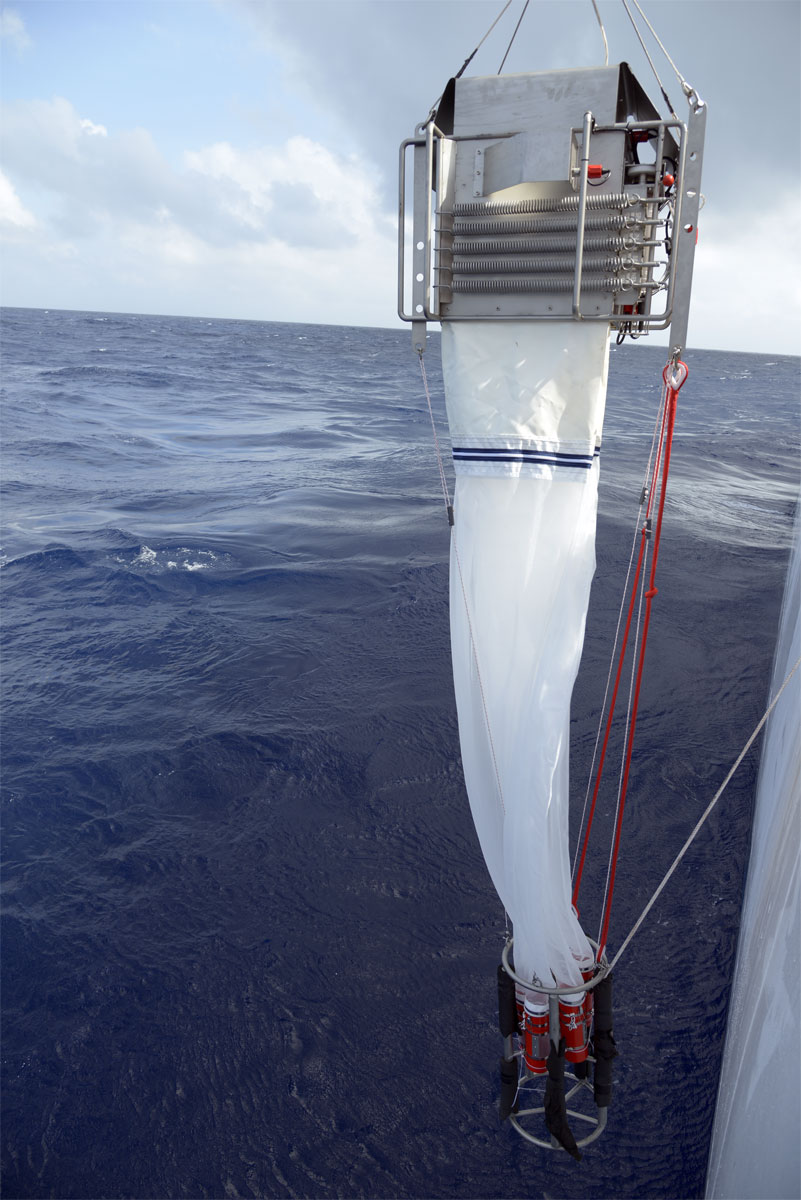
图10浮游生物连续采集网投放
离线水平拖网测试:
2017年11月27日,中心坐标E111°25’33’’,N18°13’59’’南海海域,水深1600米,5级海况,开展浮游生物分层拖网离线水平拖网测试。
备注:水平拖网要求使用在线模式,且用后甲板A架绞车。由于淞航号的同轴缆无法在20 t A架上使用,故用此次离线试验验证水平拖网的操作方式,并且也涵盖了离线垂直拖网的测试。水平拖网和垂直拖网的区别仅是网底管安装方式的不同。由于无在线监控,所以各个网只能测试依次打开,不能实现任意水平距离的拖曳。
组件组装:安装5个网衣和5个软质网底管,安装4根承重的网底管拉绳以及2根粗的红色操作绳,并打结至网底管拉绳长度,兼作保护绳,用撬棍撬起5根弹簧,并注意拉平帆布,连接绞车缆。V型缆,一根安装在网口上方,另一个安装在对角线侧,且连接深度抑制器。
系统投放:以45米/分钟的速度放缆,缆绳长度为1000 m。
采样:由于无在线缆支持,无法确定设备的具体投放深度,所以本试验规划水深较浅,采样水深为300 dbar。采样水深依次为:NET1:300 dbar– 200 dbar;NET2:200 dbar - 150 dbar;NET3:150 dbar - 100 dbar;NET4:100 dbar - 050 dbar;NET5:050 dbar - 000 dbar。系统根据压力自动换网。采样时收缆速度30 m/min。
样品收集:按要求应该使用海水水管冲洗已出水面的网衣,将尽量多的样品冲洗到网底管中。由于船的条件所致,未对网衣进行冲洗。将网衣先拉回底部的网底管框架,一人抱住网避免压到,再通过吊臂将主框架收回至甲板。检查5个弹簧都已经激发,5个网衣无损伤,各个连接件均正常。将网底管取下,通过上面的筛绢倒掉无用的海水。使用本地的海水冲刷网底管内部,将尽量多的样品冲刷下来,倒在样品瓶中。
1.14 水下浮游生物快速照相系统
浮游生物快速照相系统主要是对水下浮游生物进行快速识别及拍照,同时记录浓度水深、温度、盐度、叶绿素a浓度、溶解氧含量、姿态等参数。
对水下浮游生物快速照相系统的海上测试一共实施3次,后期主要是由于出现电池故障未能进一步测试。
第一次测试:2017年11月17日前,对水下浮游生物快速照相系统进行了多次的甲板实验,设备工作正常,确认可进行海试。
2017年11月17日,实时下水测试,试验规划下放1000 dbar水深。设备用磁棒开机后,等待约2分钟,其状态指示灯显示为橘黄色常亮,说明设备处于正常录制状态。使用专用的SUBCONN缆连接电脑的网卡,通过远程桌面,检查设备的运行状态,各个参数的数值均正常。将专用缆拆下,换成堵头。将设备下放至1020米缆长(视缆的倾斜度),然后收回到右舷侧甲板,检查设备的指示灯是否处于录制状态。由于海况较佳,实际放缆长度1020米。出水后设备已经关机。进一步操作发现设备无法正常开机与连接。
经后续处理,开机检查,设备在回收过程开始后几分钟内由于电池电压下降较快而关机。回收阶段采集到了图像资料。
第二次下水测试:2017年11月18日,中心坐标E118°19’30’’;N21°47’29’’海域,水深3800 m,4级海况,开展设备第二次下水试验。
出水后发现设备也关机了。进而发现电池A进水,电芯报废。
经使用电池B开机发现,电池进水时刻的电压在正常范围内,且设备已经开始回收,从而没有采集到样品。
第三次下水测试:2017年11月27日,中心坐标E111°9’42’’;N18°0’18’’海域,水深1700米,4级海况,使用修复好的电池对水下浮游生物快速照相系统进行第三次下水测试。
海况较差,实际放缆长度650米。收回甲板后,设备依旧稳定运行,电池舱无漏水,图像和水质数据采集正常。
1.15 温盐深剖面仪(SBE911/917)
该设备功能是通过水下传感器,对温、盐、深、DO、浊度、pH、PAR、高度计等数据进行实时传输,附带的采水单元,可根据需要采集相应水层的水样。
温盐深剖面仪整套系统由甲板单元、水下单元及采水系统组成。水下单元装置配件有电导率传感器、温度带补偿的数字石英压力,测量溶导率传感器、温度带补偿的数字石英压力,测量溶导率传感器、温度带补偿的数字石英压力,还配有测量溶解氧、叶绿素、pH探头以及高度计等;采水系统配有24个10升水样瓶。整套系统在实时记录海洋剖面温、盐、深、溶解氧等的同时,还可根据需要,采集所需水深的海水样品用于实验室分析,是海洋科学、海洋环境、海洋生物等研究的基础设备。
海试之前,供货商劳雷海洋系统有限公司工程师及上海海洋大学淞航号实验员对整套系统进行了安装调试,测试项目均正常,可以满足海试条件。
2017年11月18日11:00-14:00间, 118°19.52’E,21°47.51’N附近海域,水深约1300米;海况4级,对整套系统进行投放测试。下放至水深约1200米处,操作人员为:上海海洋大学赵旭、张亚东、黄道芬;服务商劳雷海洋系统有限公司赵胜,郭衍龙。具体操作流程如下:
1.在实验室内确定各部分之间缆线连接正确,通过数据缆连接系统与电脑;
2.开启配置软件SeaTerm或SeaTerm AF V2,建立电脑与系统之间的连接,通过软件检查系统时间,存储卡剩余及电池电压等参数,并根据需要设置数据采集频率;
3.配置完成后,确认整套系统各接口连接正常、各部件安装牢固、水密性完好,摘除传感器保护盖,将系统水下部分连接到绞车上;
4.下放过程中要求“淞航”号设备下放面迎风,避免系统水下部分压入船底,威胁设备安全,按下SBE17上的磁开关,开始下放;
5.在水表‘感温’约3分钟,开始下放,下放速度保存在1m/s左右;
6.数据采集完毕后,将设备回收至甲板,用淡水充分冲洗系统,并使用提供的针管将蒸馏水注入TC导管,冲洗电导池并浸泡下载并转化查看数据,确保数据安全。
整个投放测试过程系统运行正常。因该系统整体耐压为6800米,为测试整体设备的性能,2017年11月22日5:20-10:00,在116°33.74’E,17°19.14’N附近,水深约3900米海域进行了二次投放,参与人员与第一次一致,海况4级;全部放缆约4690米,设备实际下放深度为3500米。设备到达甲板后,经检查系统记录数据正常,无异常值出现,24个采水瓶采水正常闭合且无渗漏水情况。符合该套设备的技术规格书要求。在测试前及测试后,劳雷海洋系统有限公司赵胜就整套系统的操作、维护、保养、数据处理等向上海海洋大学相关人员进行了培训,操作人员能独立操作系统。
经验总结:CTD设备间应安装导轨便于CTD911及采水器的进出投放工作;CTD吊车应加装吸附板,便于在用CTD收放吊投放CTD911时不会出现晃动的情况,使得投放过程更加简单安全;船员甲板组与实验员队伍还需要多多磨合,在CTD仪器的搬运和投放过程中需要大家的积极参与。
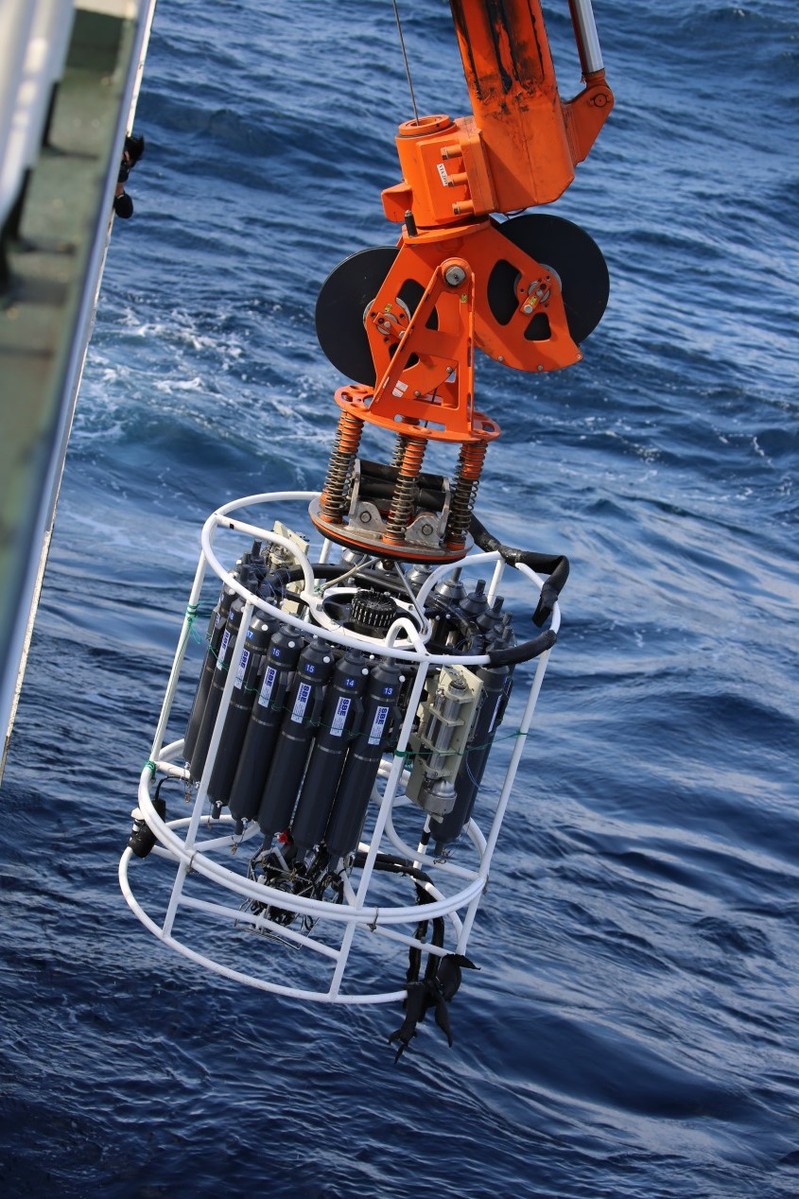
图11温盐深剖面仪投放
1.16 甲烷测量仪(1套)
甲烷是温室气体的重要组成部分。CONTROS公司生产的HydroCTM/CH4 甲烷测量仪能原位监测水体中CH4含量,避免了采样分析对结果的影响,是海洋环境监测、环境水质、海洋管道检修、海底新石油和天然气矿勘探、全球气候变化等生产研究领域重要工具。
2017年11月21日13:00,上海海洋大学赵旭、朱言江与供货商劳雷海洋系统有限公司赵胜、郭衍龙等对到货设备及配件检点后,在“淞航号”通用实验室内对甲烷测量仪进行甲板测试。主要步骤及内容如下:
1、按要求拆卸并检查“硅树脂膜”的完整性,无划痕漏洞情况存在,并确定密封O型圈在正确位置,无断裂等情况出现,检查完毕后,恢复测量仪;
2、通过连接件及相应线缆固定并连接CH4传感器和气体交换泵,通过交流电源供电,甲烷测量仪正常启动并工作;
3、启动DETECT软件,软件自动与甲烷测量仪建立连接;
4、通过测试,甲烷测量仪可正常工作,交换泵可正常运转,DETECT可实现数据的实时采集显示、测量仪配置、数据下载等全部功能;
5、在空气中,通过软件采集了一段时间的数据,数据记录正常。
经检点和测试,设备到货清单与合同一致,甲板测试,设备系统工作正常,符合海试条件。
2017年11月22日2:20-5:00;在116°35′25″E,17°21′28″N;海况4级条件下进行测试。该海域水深约3000米位置,满足设备耐压测试要求。因该设备采购时为配外部供电系统,因此此次海试主要为压力测试,过程如下:
1.检查水下甲烷测量仪各组成部分,确认密封性完好,缆线连接正确;
2.将设备固定,通过尾A架将水下甲烷测量仪下放,整个过程放缆长度为3000米;
3.水下甲烷测量仪安全回收至甲板,并用淡水充分冲洗设备外壳,避免海水残留;
4.设备到达甲板后,将甲烷测量仪放入存有海水的水槽内,组装水下甲烷测量仪各部分,并接通电源,泵启动。经检验甲烷测量仪密闭性良好,无漏水渗水等情况,符合技术规格书要求。
测试结束后,劳雷海洋系统有限公司对上海海洋大学相关实验人员进行了培训,各实验员能独立操作、维护、保养该系统设备。
1.17 表层温盐测量仪(1套)
船载实时监测表层海水温度、盐度、浊度、CDOM、叶绿素、pH、CO2等相关指标,该系统从固定深度抽取水样,经过系统各个传感器,可在航行过程中时时记录储存环境数据,扩展海洋调查数据空间的分布和时间的连续性。是进行海洋环境、海洋环流、海洋污染等科学研究重要的支撑。
该系统在天津新港船厂已经按照技术规格书完成安装及调试任务,此次航行过程中主要是检验系统数据采集及运行情况。参与人员主要为:上海海洋大学赵旭、黄建、黄道芬;劳雷海洋系统有限公司赵胜、郭衍龙。
2017年11月15日8:31—2017年11月16日23:30,整个系统连续走航测试40小时,实时记录走航数据,设备总体运行正常。SBE45温盐传感器、SBE38数字式海洋温度计、SBE18 pH传感器、SBE63 溶解氧传感器、WETStar叶绿素荧光传感器、WETStar CDOM传感器、WET Labs浊度传感器、HydroC FT CO2传感器、HydroC FT CH4传感器等搭载的传感器均能正常记录数据。整个测试周期内,总体运行良好,但还存在一些问题,如流量控制调节不灵敏、CO2、CH4等参数数据记录过程中时有丢失数据、蠕动泵流量调节加大后噪音增大等。针对存在的问题,海试小组已与供货商劳雷海洋系统有限公司工程师签订备忘录,待航次结束靠靠港后,由供货商安排技术人员到船解决。
1.18 Lower ADCP-300K (2套)
声学多普勒海流剖面仪是物理海洋调查所必备的设备。LowerADCP可与其他投放式设备同步投放,一台换能器朝上、一台朝下,可在下放的过程当中时时获得该位置海流剖面数据,是传统单点海流计工作效率的几十、上百倍。
L-ADCP送货到芦潮港码头,2017年11月10日,由上海海洋大学陆雪俊、孟令文;供货商劳雷海洋系统有限公司赵胜、郭衍龙对设备及配件进行清点,实际到货设备与合同要求一致。
2017年11月15日19:00-21:00,在“淞航”号水文生化实验室内,对两套声学多普勒海流剖面仪进行了实验室测试,参与人员:赵胜、陆雪俊、孟令文、赵旭。详细内容如下:
1.将声学多普勒海流剖面仪各部分按测试要求组装起来;
2.使用实验室交流电源给设备供电,设备工作正常;
3.启动软件BBTalk对两套设备进行了测试,软件与设备能正常通讯,符合海试投放条件。
2017年11月22日16:00-19:20,在116°20′05″E,17°7′19″N附近海域,进行投放测试,测试海域水深约3975米;海况5级。将两台声学多普勒海流剖面仪同步下放,其中SN:24481声呐头朝下,SN:24482声呐头朝上。
现场参与人员:①劳雷海洋系统有限公司:赵胜、郭衍龙;②:上海海洋大学:陆雪俊、孟令文、赵旭
两台系统耐压设计为6000米,因此次测试水域实际水深为3900米,设备实际投放深度为3000米,试验过程如下:
1.在实验室内,分别将两台海流剖面仪连接到电脑,采用内部电池供电;
2.启动软件BBTalk,将配置文件发送给当前连接的海流剖面仪,完成配置后,按照提示断开与电脑的连接,安装好堵头,准备下放;
3.将两台海流剖面仪安装支架连接到绞车缆绳上,并开始下放;
4.期间共放缆大约3000米,由于海况恶劣,船尾部A架摇晃幅度极大,导致设备有与船壳碰撞现象。最后将设备回收至甲板,并用淡水彻底冲洗设备外壳;
5.在实验室内,分别连接两台海流剖面仪到电脑,并下载设备内部存储卡内数据。
两台海流剖面仪配置相同,层厚设置为8米,共20层,通过软件WinSC下载并查看整个剖面采集数据。
1.19 大体积水样抽滤系统(2套)
大体积水样抽滤系统能定点、定深度,可根据需求选取滤膜,采集水体中悬浮和(或)溶解性颗粒物质,其最大耐压5500m,是用来在湖泊、河流、海洋、水库等多种水体条件下进行浮游生物采集、痕量元素样品采集、沉积物颗粒采集等重要手段。弥补了常规采水抽滤中出现的样品量不足的问题,是海洋科学、海洋生物、海洋环境等研究重要基础采样设备。
2017年11月22日,上海海洋大学赵旭、黄建、张亚东及上海昌睦环境科技有限公司陆宇豪、衣文对2套设备到货清单进行清点,实际到货备品与合同不符,已与对方沟通,待到港后根据合同点验。当天下午,供货商就设备使用在甲板进行培训,并对整个系统进行测试,具体测试步骤:
(1)安装吸排水透明管;
(2)将滤筒装不满水,安装到滤筒座上;
(3)安装并打开软件Motocross;通过数据线连接SR232数据线;
(4)设置串口信息及文件存储位置;
(5)设备反向吸水,将内部充满水;安装滤膜;
(6)设定6分钟后工作模式进行测试,设备工作正常;
经测试,整套系统工作正常,各部件能正常记录数据,符合海试条件。
2017年11月23日1:00,在116º34'7E,17º19'51 N,水深4000m水域进行投放试验,海况4级,参加人员:衣文陆宇豪黄建赵旭及甲板A架操作人员等,两套设备同时投放。具体步骤如下:
(1)将设备连接电脑,设置工作时间3:30启动,工作时间30min,同时安装好0.3μ滤膜,整套设备安装完成后固定在后甲板A架上,两套设备设置参数一致;
(2)1:20投放设备,下放速度为1m/s,到达预定深度后停留30min;
(3)收回设备,回收甲板后,用淡水冲洗干净,取出滤膜,导出实验数据
经数据分析比较,两套设备均按照正常的预设程序工作,滤膜上也采集到悬浮颗粒物样品,但由于该设备设计耐压5500m,我们实测水域最大水深仅4000m,其最大耐压水深有待于今后实验中检验。其他传感器及数据等均满足技术规格书要求。
此次首航水文环境7件套设备基本满足技术规格书要求,部分有问题现象也与供货商协商,双方签订备忘录,待船舶到港后由供货商一并解决。
1.20 水下甲烷测量仪
水下甲烷测量仪是一款测量从液体中扩散出来的烃类/甲烷分子浓度的系统。水体中烃类/甲烷分子通过一种特别设计的硅树脂膜(专利设计)到达检测室,当甲烷受到红外光束照射时,甲烷选择性吸收特定波段的红外辐射,从而表现为特定波段透射光的强度变小,利用光电器件将透射光强度变化转换为电信号,经过计算可以准确得出甲烷浓度。
2017年11月21日13:00-13:30,上海海洋大学“淞航”号上供货商劳雷海洋系统有限公司赵胜、郭衍龙与上海海洋大学赵旭、朱言江、黄道芬对设备及配件进行清点,具体设备清单见附件1。实际到货设备与合同要求一致,符合供货要求。
实验室测试:2017年11月21日13:30-16:00,在“淞航”号实验室内,对水下甲烷测量仪进行了测试,
海上试验:水下甲烷测量仪适用于系统集成(如ROV)或水体长时间连续观测,因该设备计划与其它系统集成而未配备相应电源系统,因此不能完成水下数据采集。因此此次试验只对压力进行测试。测试完毕后,在实验室检验设备工作是否正常,数据是否符合技术指标要求。
2017年11月22日2:20-5:00;位置:116°35′25″E,17°21′28″N;海况4级。将水下甲烷测量仪下放到水下约3000米位置,检查测量仪的水密及耐压性,过程如下:检查水下甲烷测量仪各组成部分,确认密封性完好,缆线连接正确;将设备固定,通过尾A架将水下甲烷测量仪下放,整个过程放缆长度为3000米;水下甲烷测量仪安全回收至甲板,并用淡水充分冲洗设备外壳,避免海水残留;经检测,甲烷测量仪密闭性良好,无漏水渗水等情况,压力测试通过。
实验室数据采集
2017年11月22日10:00-11:00,将水下甲烷测量仪放入存有海水的水槽内采集相应数据,内容如下:组装水下甲烷测量仪各部分,并接通电源,泵启动,设备工作正常;开启软件DETECT并记录数据,甲烷浓度数据符合海水中甲烷浓度范围,数据采集正常。
使用前的培训:
水下甲烷测量仪在测试试验过程中,劳雷技术人员赵胜对上海海洋大学朱言江、黄道芬、赵旭等相关使用人员进行了培训,内容如下:详细讲解了水下甲烷测量仪的基本原理,维护保养等内容;现场介绍了水下甲烷测量仪各部分组成以及它们之间缆线连接,现场使用注意事项等;对操作人员进行了软件DETECT培训,包括测量仪配置,数据查看,数据下载转化等内容;培训完毕后,上海海洋大学相关实验人员又进行了现场操作训练,掌握了水下甲烷测量仪使用的基本步骤和注意事项。
海试结论:经现场点验,实际设备(含配件)情况与采购合同一致;经培训,上海海洋大学工作人员已熟练掌握整套系统的基本原理,系统接线,操作使用,维护保养,数据处理等内容;根据实验室及海上实际测试情况,上海海洋大学此次采购水下甲烷测量仪工作正常,系统硬件和性能均符合合同及技术规格书中各项要求,达到系统正常工作标准。
问题总结:水下甲烷测量仪此次测试工作遇到了一些问题。首先,甲烷测量仪没有自带供电系统,只进行了3000米水下耐压测试,后续的仪器工作状态是在实验室进行的,之后需要对甲烷测量仪供电系统进行购买或者协调其他供电设备如ROV进行测试。
1.21 600m水下机器人
水下机器人(ROV)系统包括水面控制系统,脐带缆和水下机器人主体。其中水面控制系统包括PSU/SCU ,VRU和HCU,安装在一个运输集装箱内。
在之前由天津到上海的航次已经完成了设备的测试。本航次下放的主要目的是进行耐压测试。按照说明书和之前设备商的指导进行各个部分的安装。
把ROV放入水里后,检查 ROV的平衡和漂浮状况(取决于搭载的辅助仪器设备),之后可以开始启动ROV。在 ROV潜入水中之前,需要重置深度计和陀螺仪,建议对 ROV的机动性进行简单的测试。大部分故障和损坏来源于脐带缆,因此,操作过程中需要注意下列事项:
1.在船上布放 ROV 时,操作人员要特别注意船的推进器螺旋桨叶轮,避免脐带缆经常缠绕入内造成损坏。
2.避免脐带缆在船舷滑动,船身上污垢或其它可能会损坏脐带缆的外皮。
3.如果脐带缆布放的长度超出 40-50 米,应该电缆合适的位置安装浮球,使脐带缆为零浮力。
4.操作过程中,按要求排出相应的电缆,过多的电缆会缠上水下岩石或水下障碍物。
5.操作过程中,特别要注意防止脐带缆打结,ROV 过多的旋转会造成脐带缆打结,操作时应特别注意。
6.在操作 ROV 过程顺着水流的方向,正确的运动方向,可以使脐带缆远离船舷和螺旋桨。
在每次完成潜水工作后都要按照下列表格里的内容检查ROV:
1)检查照明设备功能是否正常。
2)检查推进器是否按照手动控制器发出的指令运行。
3)检查云台的功能是否正常。
4)检查辅助的仪器设备功能是否正常。
5)手动旋转螺旋桨检查,看磨擦力是否过大,或者是否有噪音。
6)检查 ROV和脐带缆,并确认表面没有损伤。
7)使用淡水清洗全面清洗 ROV。
8)使用防雨布遮盖 ROV,防止太阳爆晒。
本次试验由于海况影响只下潜到水深300米处,没有达到600米的最大水深,一切工作情况良好。
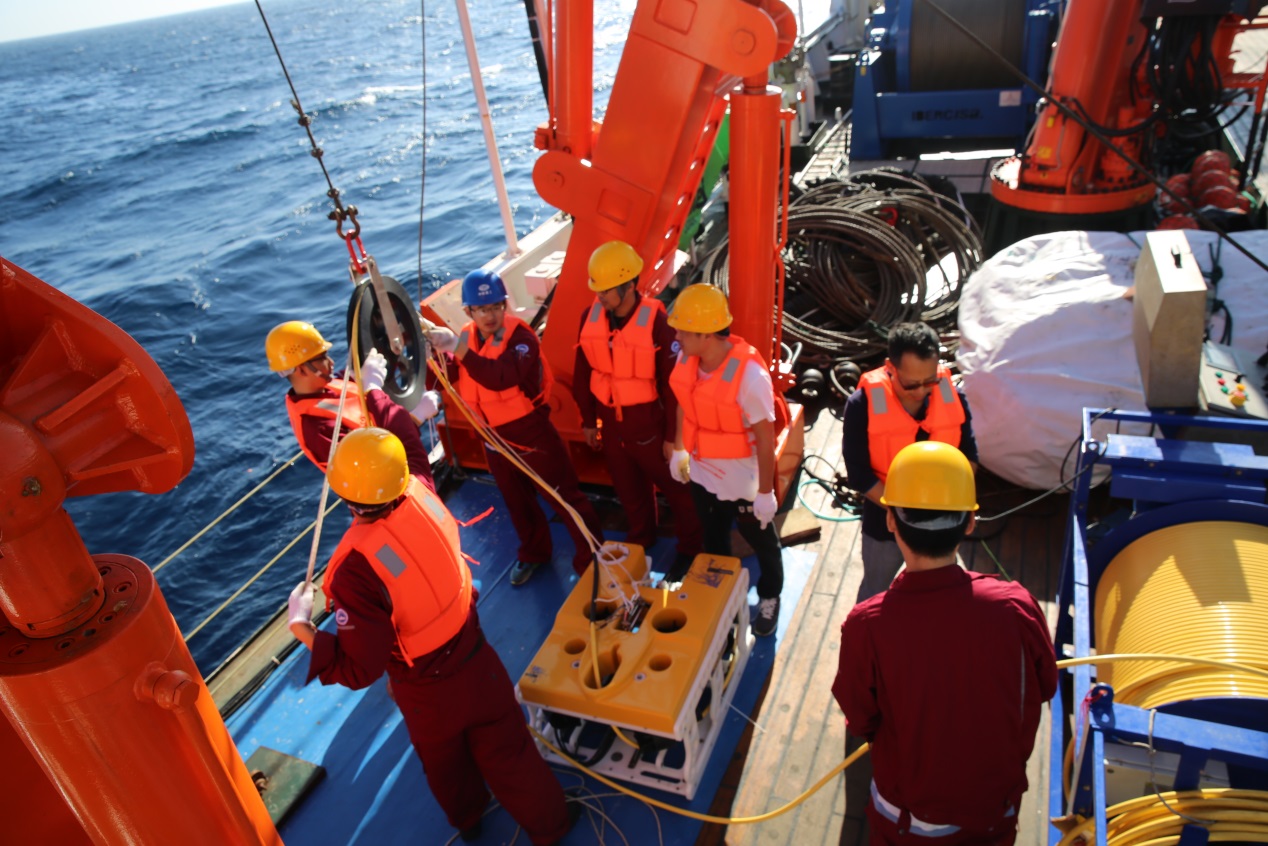
图12 ROV投放
1.22海水保压采样设备试验
海水保压采样设备,采样时搭载于CTD采样器上,可获取深海海水样品,并保持样品处于原位压力,是科研工作者研究海洋微生物的有力工具。所获取的高压海水样品可用于后续的实验室研究,例如微生物胞外酶学测定、嗜压微生物的分离培养等等。实验的目的是检验该设备是否可以正常工作。2017年12月9日,上海海洋大学首套海水保压采样设备在东海海域测试。东海海域,天气晴朗,微风,海况良好。08:00就开始了下水测试前的准备工作。保压采样设备的压力补偿器充入高压气体,压力传感器进行电脑激活,其他各部件检查工作也都进展顺利。同时,工作小组已经组织大家将CTD采样器准备就位。然而将该设备挂载到CTD采样器时却遇到了一点问题:挂壁规格不匹配,保压采样设备的挂壁稍微高出2毫米。还好问题不大,将该挂壁用锉刀消减2毫米即可解决。
参与实验的老师工作起来都很积极认真,老师们找来锉刀,仔细打磨规格不匹配的挂壁。经过几次测试后,大家成功将设备挂载到CTD采样器上。其他几位实验员也积极准备着,仔细检查CTD采样器下水前的各个细节,一丝不苟。到12:00准备工作全部完成。
01:00,实验正式开始。实验员同志操控CTD水文绞车,在甲板工作人员的配合下,将CTD采样器连同保压采样设备顺利入水。1米每秒,CTD采样器很快就抵达了预定的100米水深,并在电脑控制下打开采样开关,触发设备开始工作。
本次实验是该保压采样设备的首次验收测试,标志着该设备正式进入服役状态,未来将为上海海洋大学深渊中心的科研工作者带来重要的深海高压海水样品,有利于促进深海微生物胞外酶学、嗜压微生物培养及嗜压机制等方面的研究,进而促进我校深渊科学的快速发展。
1.23海洋病毒和压载水采样
海洋病毒样品采集:
目前,各国科学家已在大西洋沿岸,印度洋及太平洋中东部进行环球考察,建立了一系列病毒宏基因组数据库,极大推进了海洋病毒学研究的发展。然而在太平洋彼岸,我国东海与南海海域,尚未见海洋病毒相关报道。
本航次共进行海洋病毒实验1次,涉及到水样采集、过滤仪器组装及调试海水样品过滤及保存3部分。未采集南海水样,因为微生物、病毒无法在常温条件下长期保存,而第一航段不具备保存条件。
水样采集: 2017年12月9日午间12:30,于东海海域(123°57′444″E, 26°53′510″N)停船放置CTD取水仪器,海底深度115m,最终放置深度100m,分别于95m、50m及5m三个垂直断面取水共计130L,在各深度水样中,20L用于海洋病毒现场过滤;1L置于容器中,-20℃保存,待返回陆地进行微生物分析。
过滤仪器组装:

图13 微生物预过滤系统
图14 病毒过滤系统
安装时间约2小时,期间设备运行正常。主要设备能固定于实验台上,但浪大时仍不便于作业。
海水样品过滤流程:
海水原样——预处理,去除微生物污染(用0.2μm滤膜过滤,取滤液)——按照1L海水加1mg氯化铁的配比加入沉淀剂,使病毒与氯化铁共沉淀,室温放置1小时——用1μm滤膜过滤沉淀液,截留到膜上的有色物质即为氯化铁+病毒混合物,弃去滤液,将滤膜密封后可在4℃条件下长期保存,待回到实验室进行后续病毒分离、DNA提取工作。
本次过滤从下午14:30开始,于晚上21:40结束,3瓶水样(20L×3),实验时间持续7小时,共获得3份滤膜,保存于4℃冰箱中。
船舶压载水样品采集 船舶压载水是外来生物入侵的主要途径之一。掌握航行条件下船舶压载水中浮游生物、水质变化情况,将为压载水中携带生物的防治及灭除提供依据。
本航次实验进展
按照采样计划,“淞航”号起航后在舟山海域进行压载,于11月9日开始正式取样,采样安排为距压载起始日0天、1天、2天、3天、4天、5天、10天、15天、20天、25天及30天分别在9号压载舱进行采样,收集水化样品(2瓶),10L过滤后浮游植物样品(2平行)及50L过滤后浮游动物样品(2平行),并现场测定盐度、温度两项指标。
总结语:
2018年11月8日至12月12日,短短的35天,在经历数日的大风大浪之后,“淞航”号顺利地完成了本次东海至南海首航的科考任务。主要任务是完成了各项设备的测试和验收。
这里需要感谢“淞航”号刘志良船长及其船上的所有船员的辛勤劳动,船厂以及船舶设计单位、仪器和设备提供方的通力合作,感谢学校的坚强有力的组织和领导,确保“淞航”号首航完成各项预定任务。